Multimodal agents in robotics, AR, and autonomous driving must reason about places and layouts from continuous egocentric streams, often using evidence outside the current view. Existing benchmarks either evaluate offline over full videos or target events rather than spatial structure. We introduce OVO-S-Bench, a fully human-annotated benchmark for streaming spatial intelligence, comprising 1,680 questions over 348 source videos. Annotation involves 12 trained annotators (each also serving as a blind cross-reviewer) across roughly 804 person-hours of multi-round quality assurance. Each question carries a query timestamp and an evidence interval, and at evaluation, the model sees only the prefix preceding the query. Questions span four levels of increasing abstraction: instantaneous egocentric perception, spatiotemporal context tracking, spatial simulation and reasoning, and allocentric mapping. Across 38 proprietary and open-source MLLMs, Gemini-3.1-Pro trails human experts by 27 points (59.2 vs. 86.6), with allocentric mapping as the dominant bottleneck. Notably, streaming and spatially fine-tuned MLLMs underperform their own backbones. We further find that chain-of-thought reasoning amplifies spatial errors when ungrounded in the stream. By exposing these limitations, OVO-S-Bench establishes a demanding testbed for next-generation streaming spatial MLLMs.
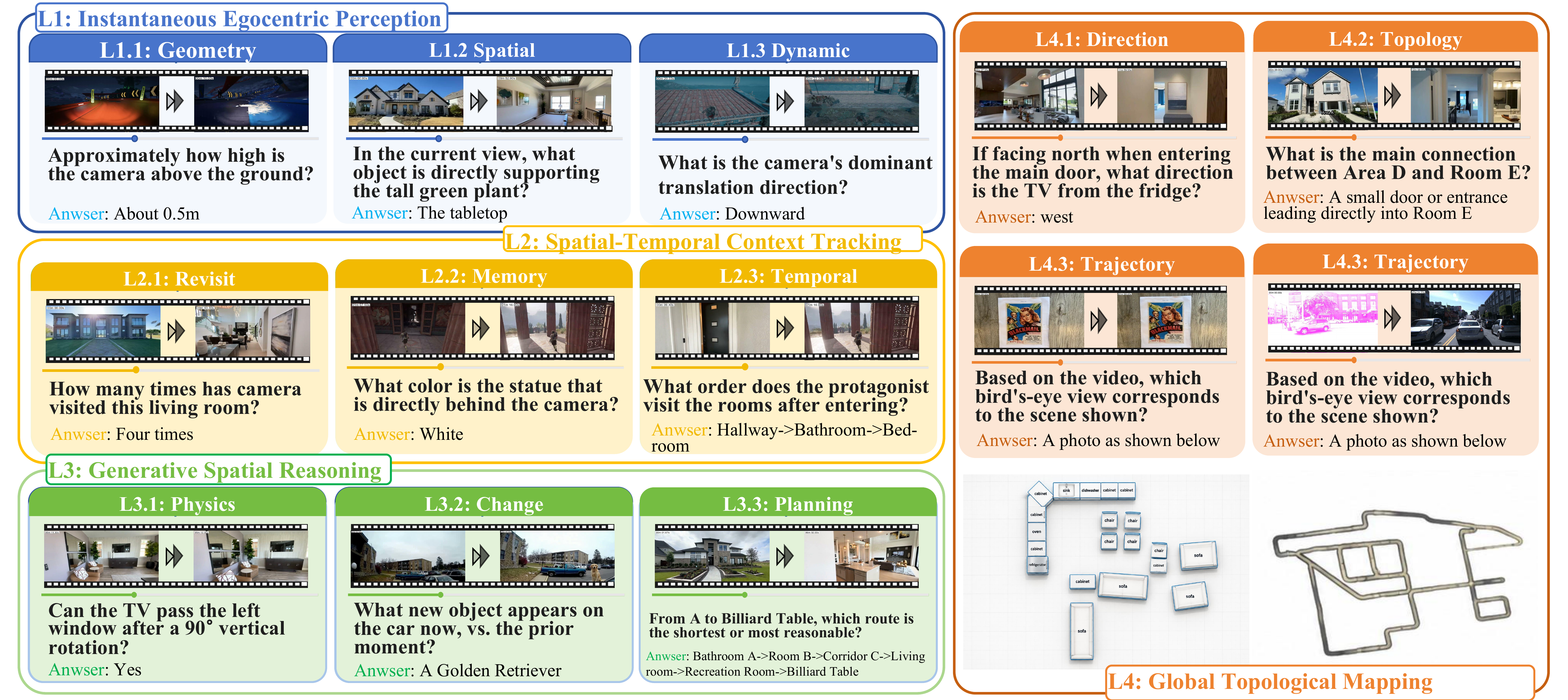
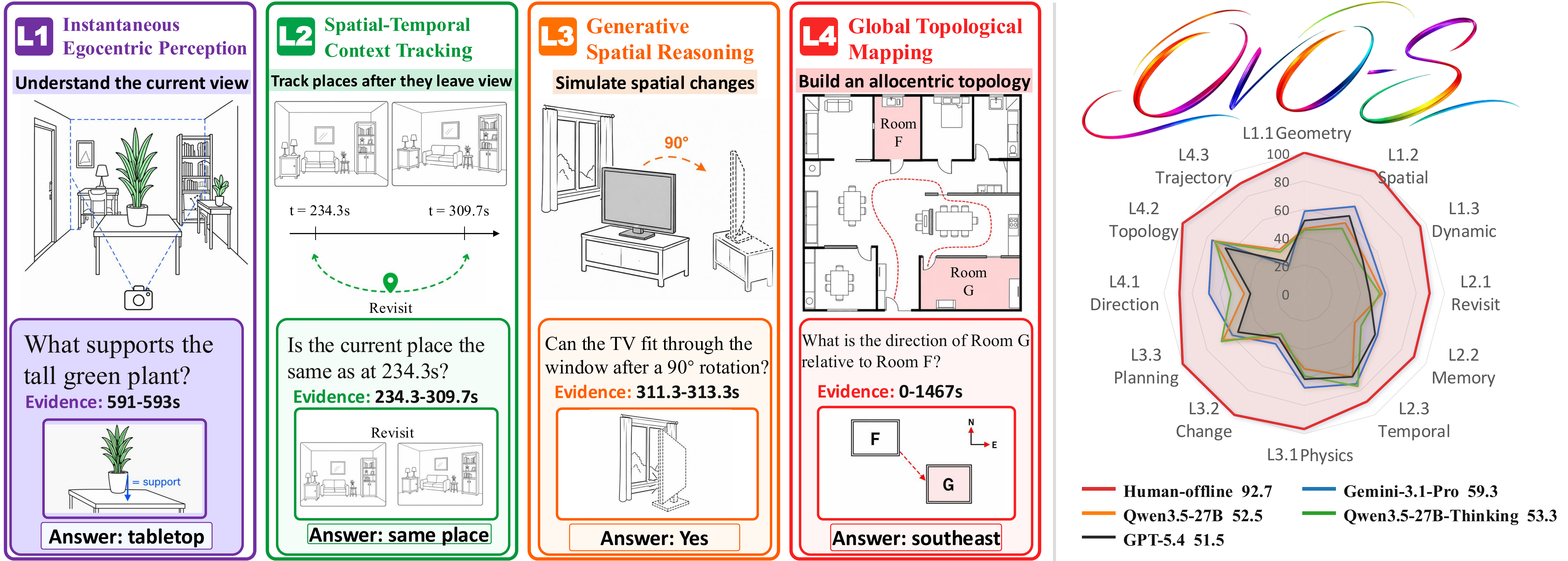
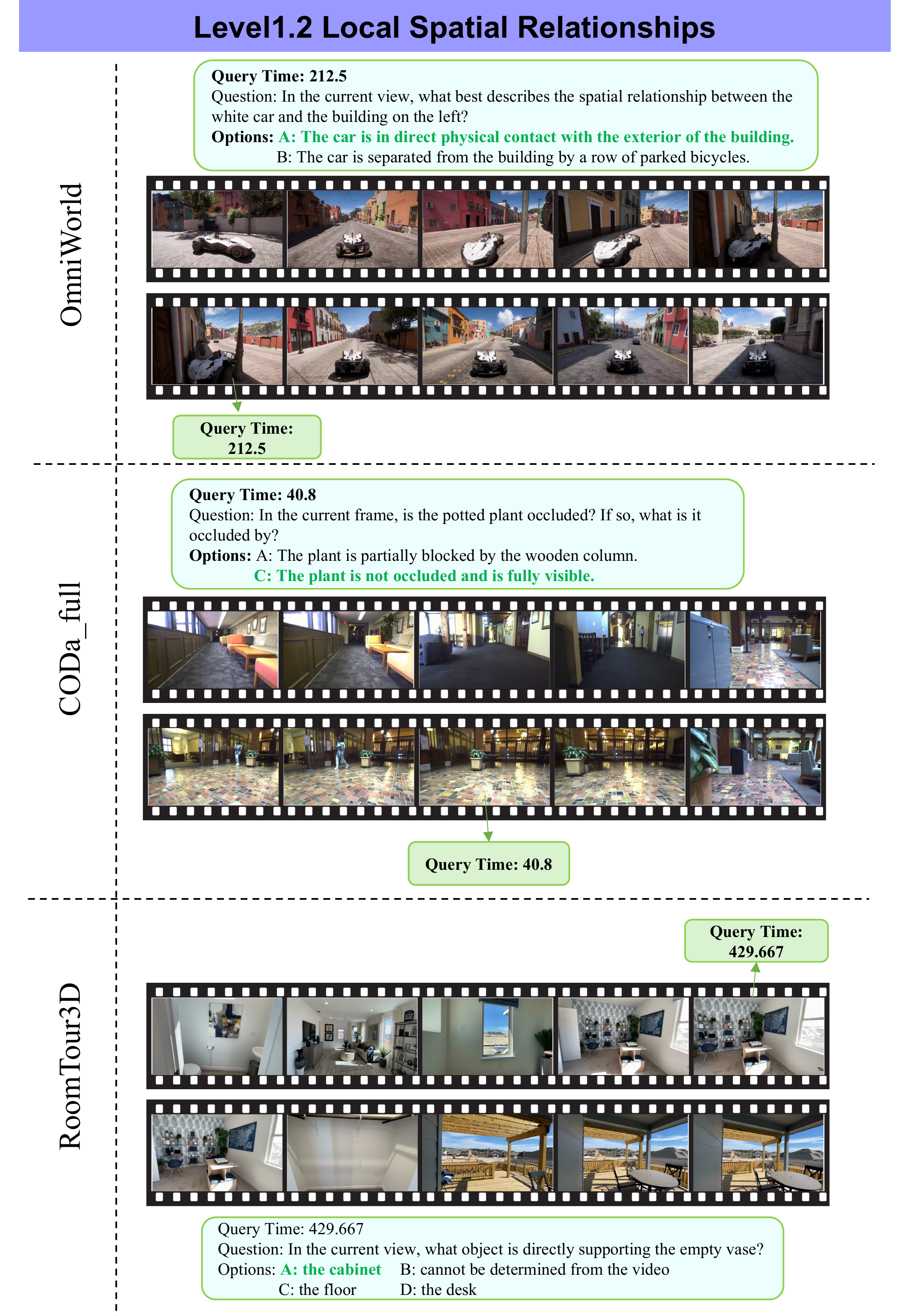
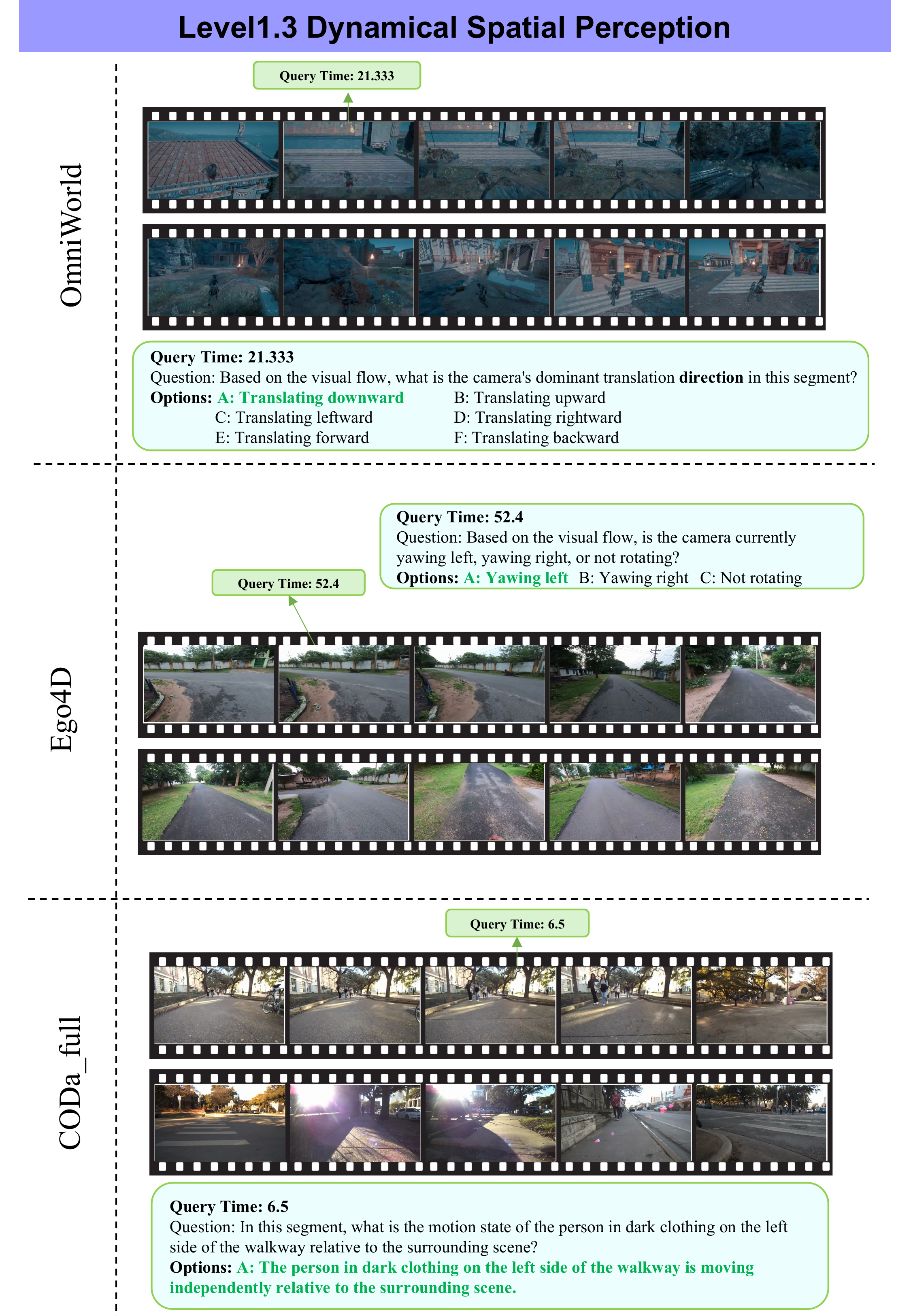
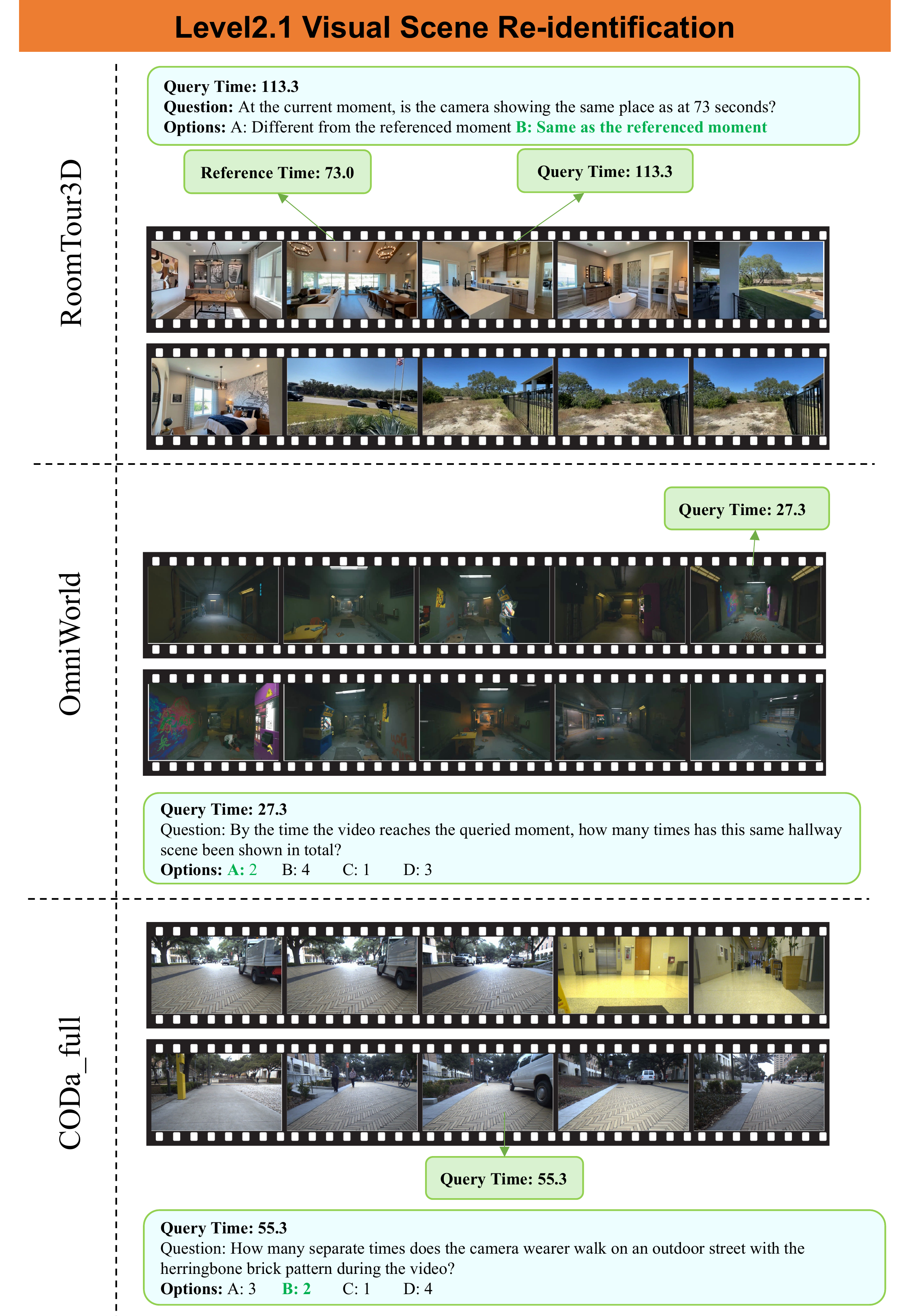
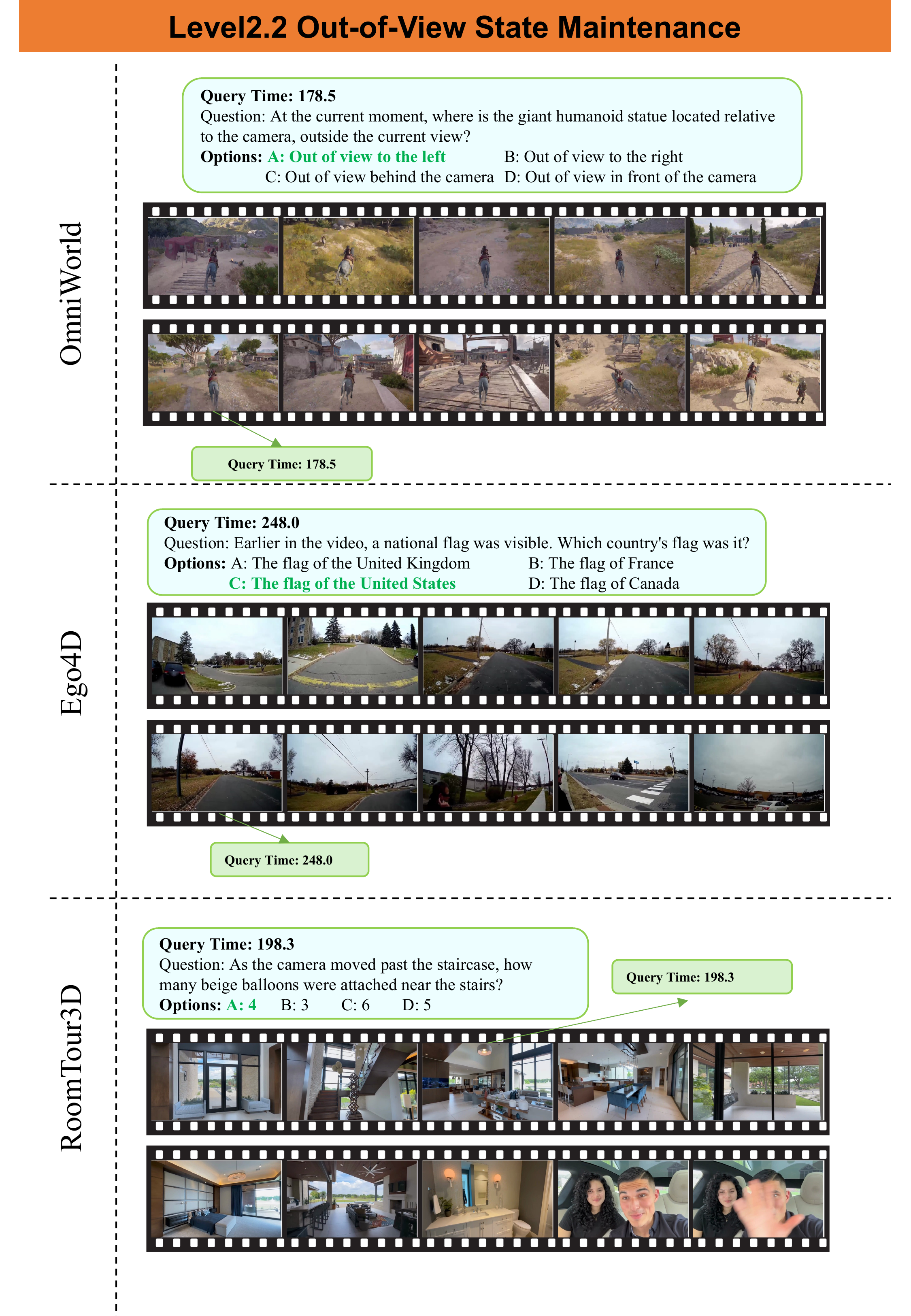
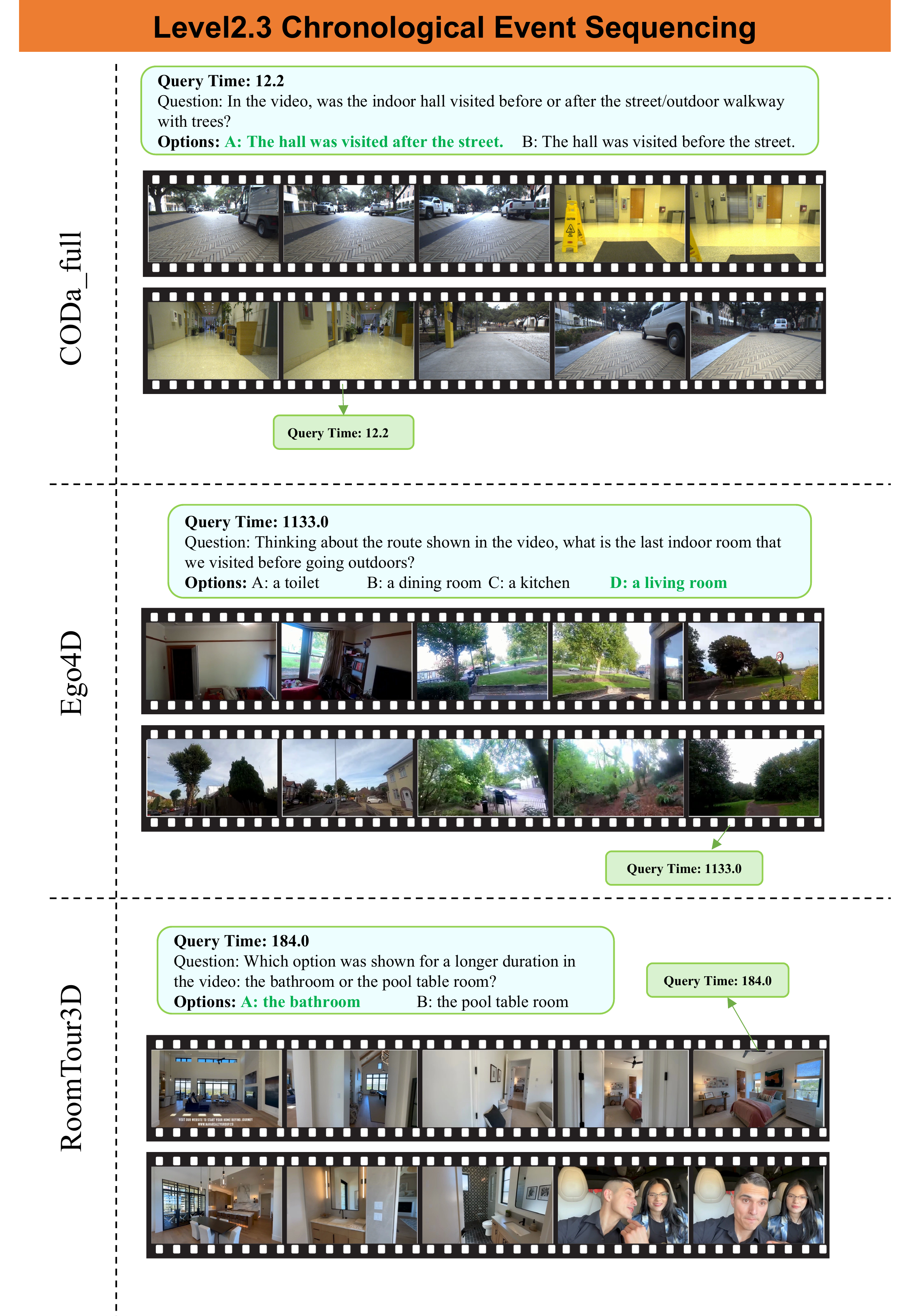
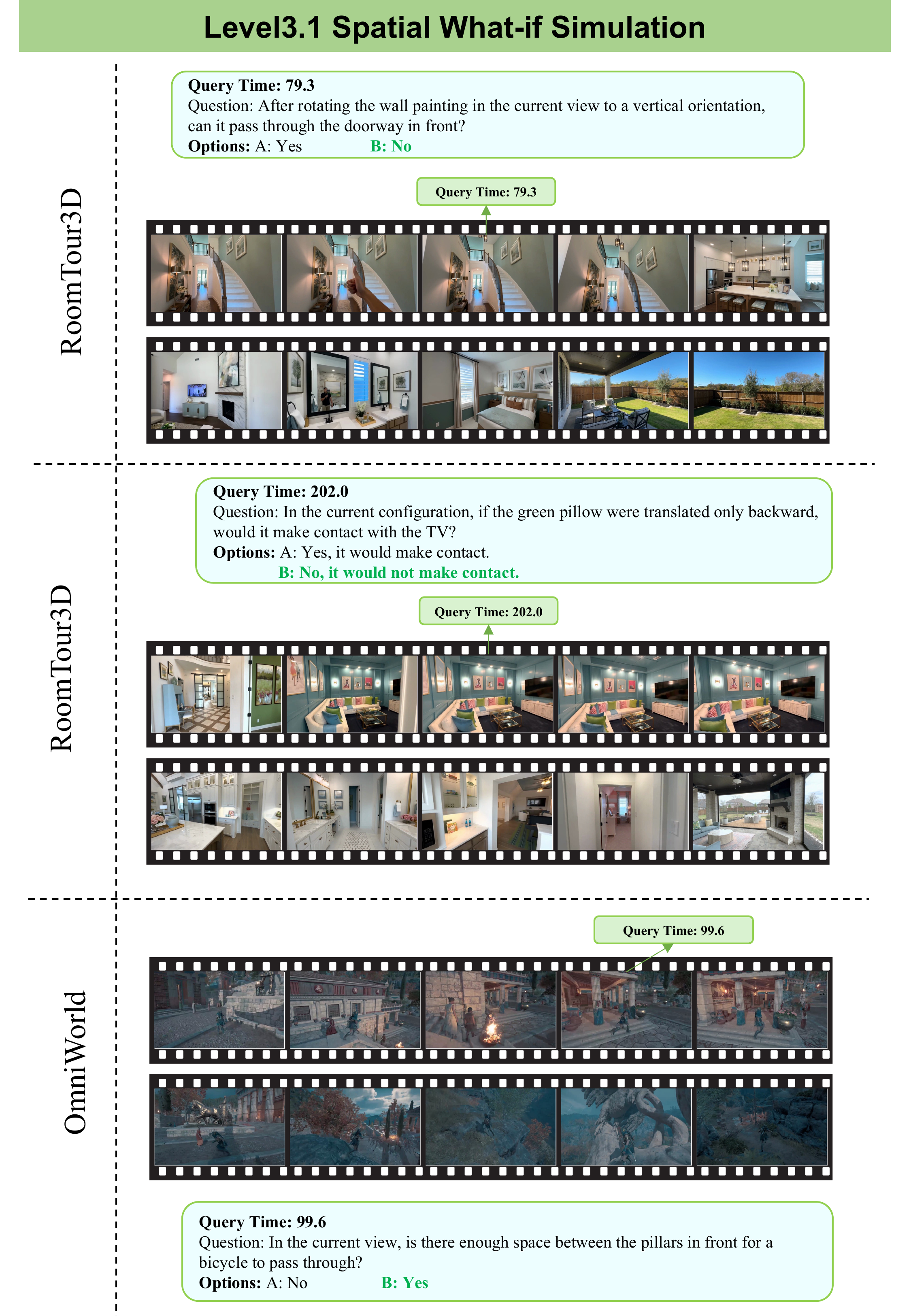
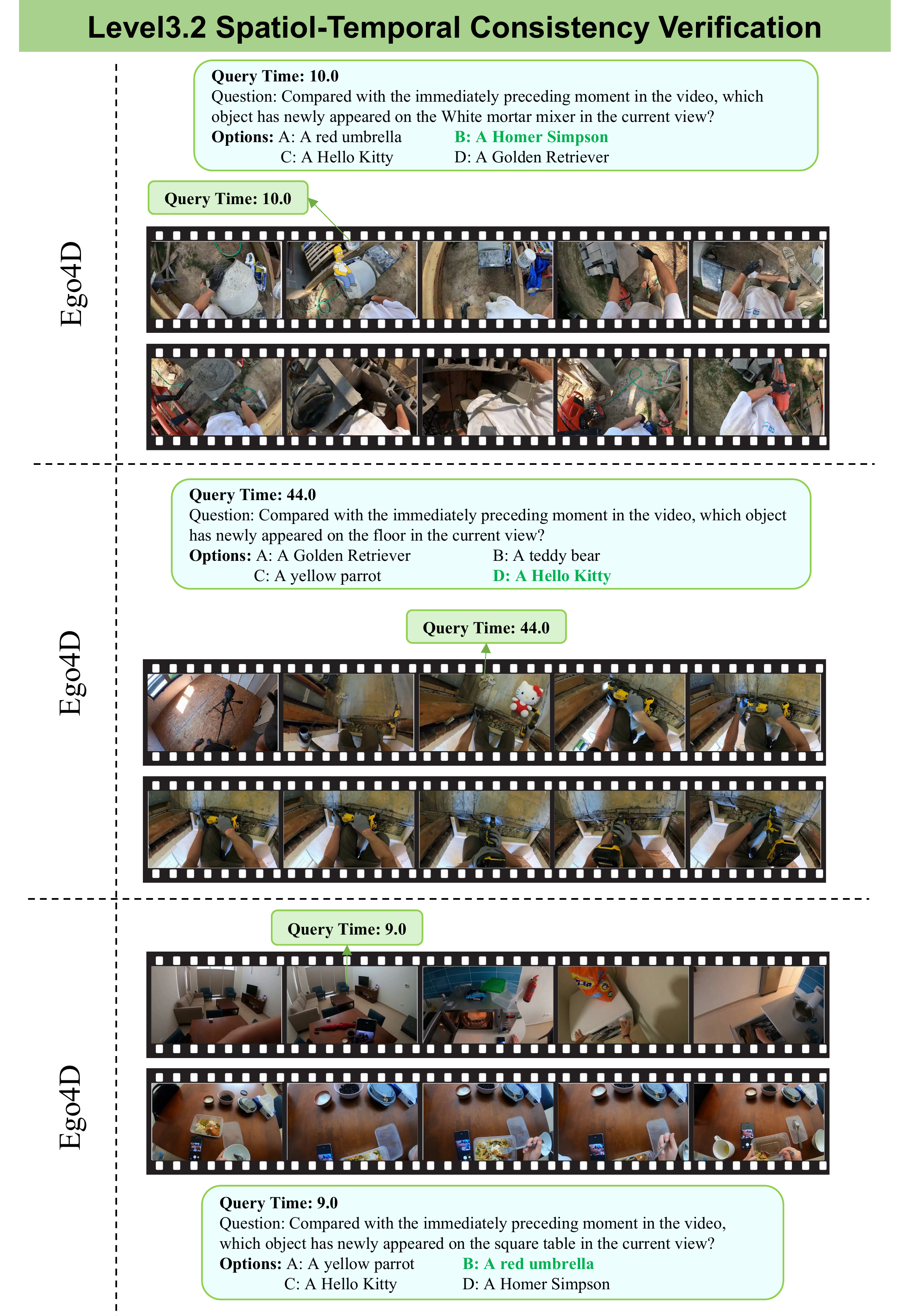
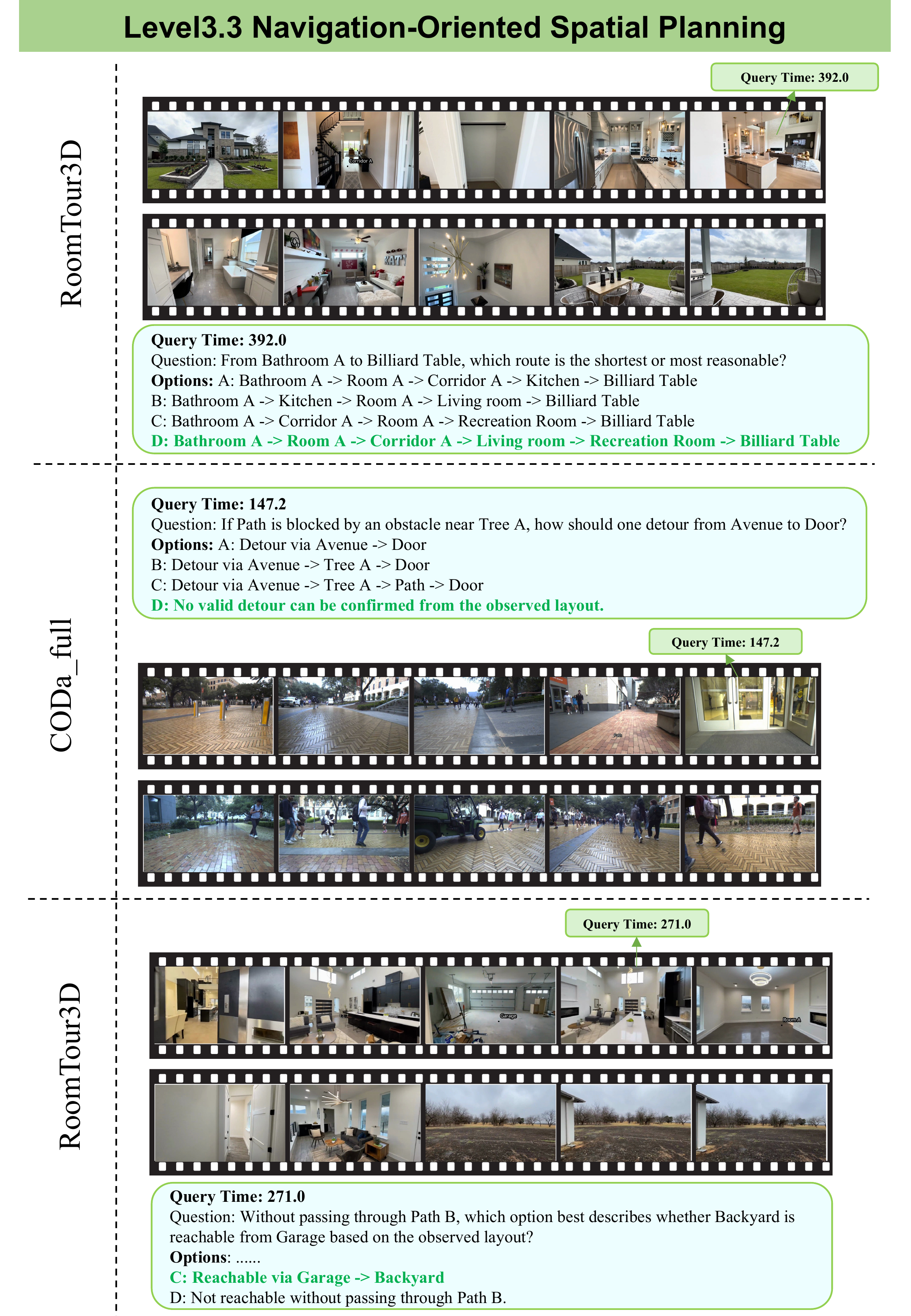
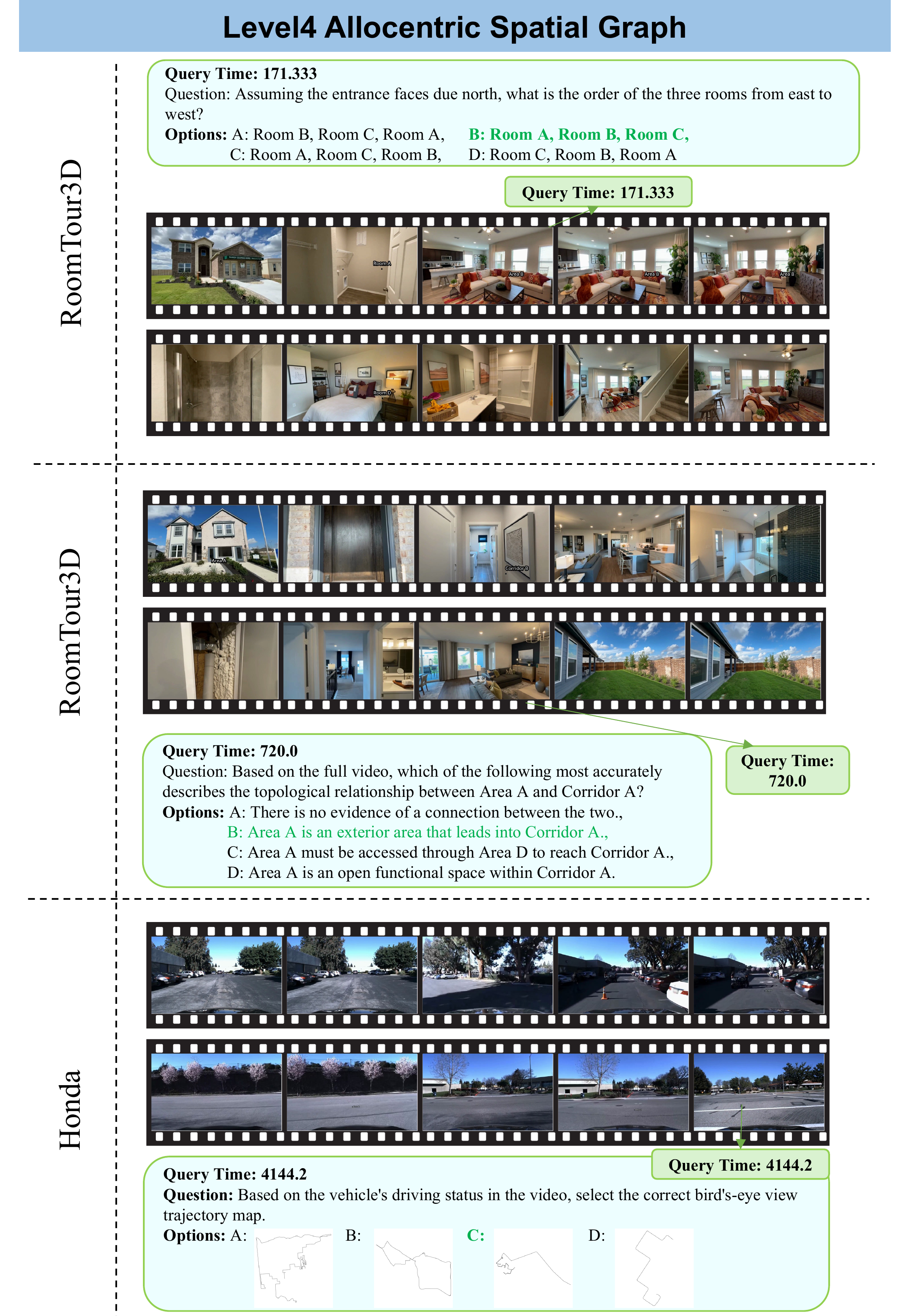
Representative OVO-S-Bench examples. Each card pairs a spatial question with visual evidence, illustrating the progression from current-view perception to allocentric mapping.
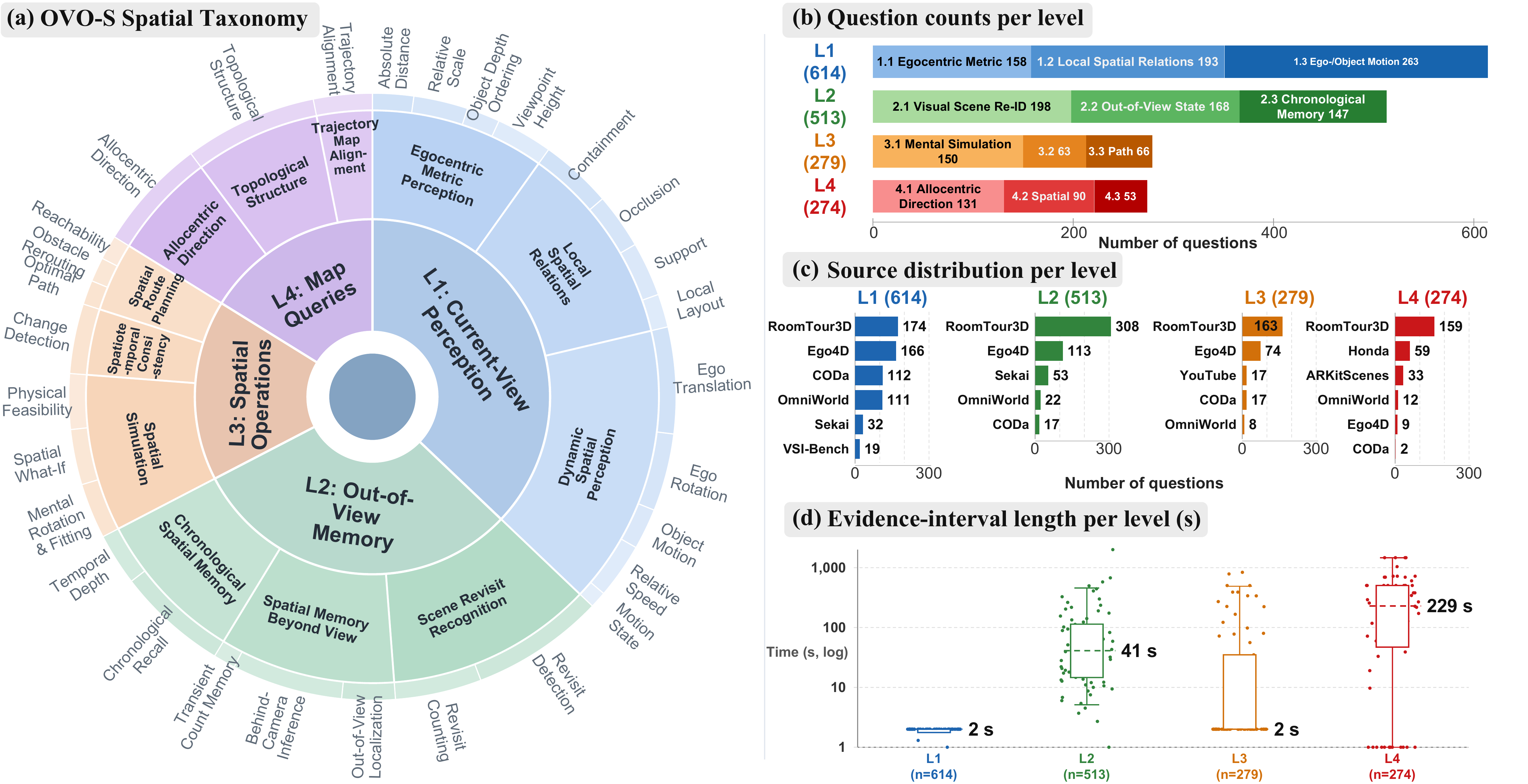
Taxonomy and benchmark statistics. The left panel gives the four-level spatial taxonomy; the right panels report task-family counts, source distribution, and evidence-interval lengths by level.
The released benchmark comprises 1,680 questions over 348 source videos from 9 datasets, organized into 30 canonical task types across four levels. Mean prefix at query time: 8.8 minutes. Evidence-span medians: L1 2.0 s, L2 36.8 s, L3 2.0 s, L4 278.7 s — reflecting the spatial persistence each level demands.
Video sources. OVO-S-Bench draws from 9 publicly available sources covering five regimes: indoor walkthroughs (RoomTour3D), egocentric activities (Ego4D), outdoor/world scenes (Sekai, OmniWorld, YouTube walking tours), driving videos (CODa, Honda HDD), and spatially annotated 3D environments (ARKitScenes, VSI-Bench).
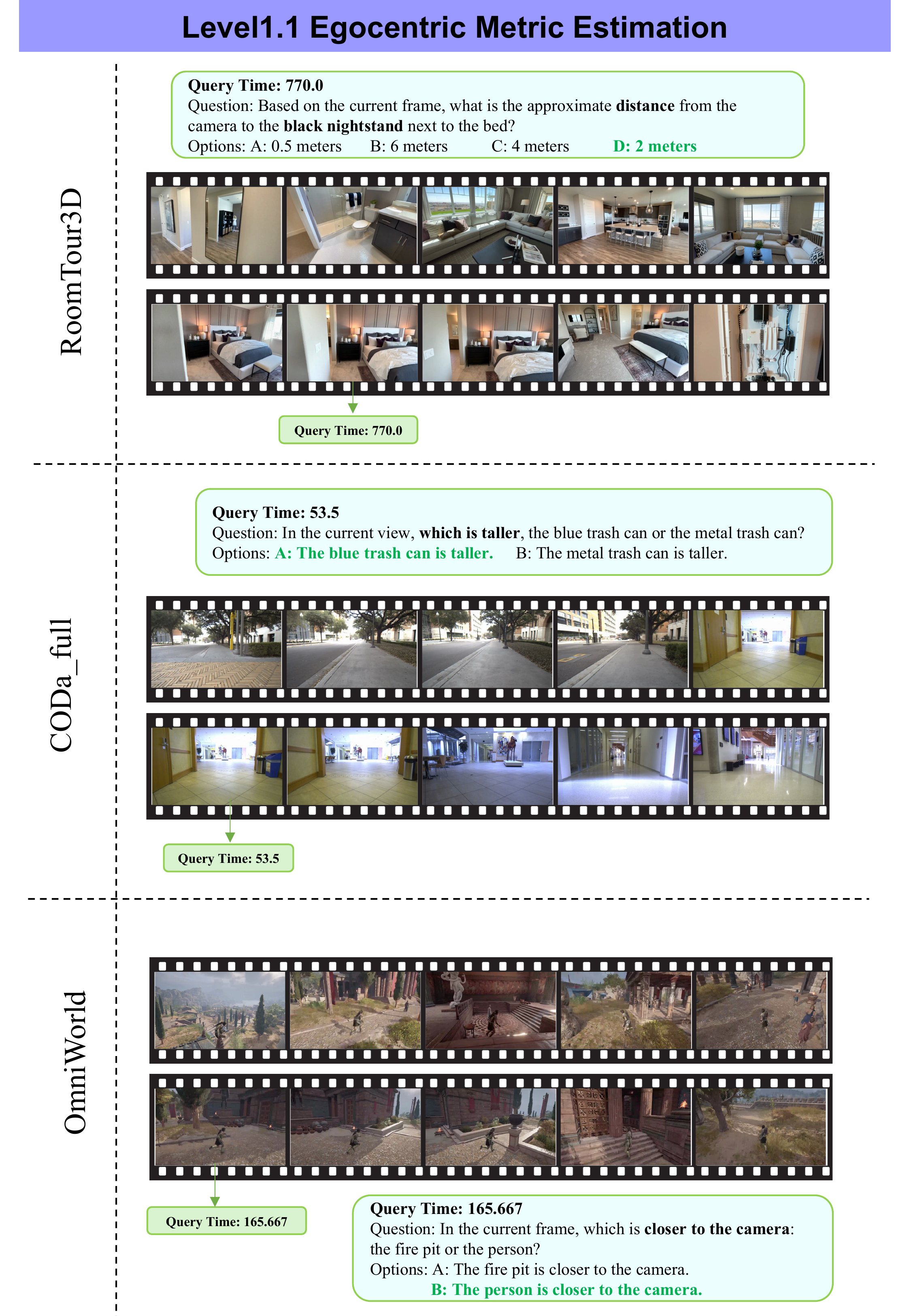
Human annotators write every item. Annotators with 3D-vision backgrounds choose clips with stable motion, clear viewpoints, and enough spatial variation for the target level. For each item, they record the video, task label, question, options, answer, query timestamp, and evidence interval. Some task types employ specialized construction techniques such as image editing to generate spatial-change contrasts.
Streaming setting. The answer must be derivable from the video prefix before the query timestamp. Annotators mark the shortest interval that contains the needed evidence and write distractors that are plausible under the visual context but wrong under the annotated evidence.
Quality control removes shortcuts. A text-only LLM probe flags items that leak the answer through wording, common sense, or option asymmetry. A second annotator then cross-reviews each item without seeing the original answer, checking that the answer and evidence interval are sufficient. Recurring problems are folded back into the annotation guideline.
Six observations about the current state of streaming spatial intelligence, from 38 evaluated systems on OVO-S-Bench.
| Model | Params | L1 | L2 | L3 | L4 | Overall | Rank |
|---|---|---|---|---|---|---|---|
| Baselines & Controls | |||||||
| Random Baseline | – | 29.8 | 35.1 | 33.3 | 27.1 | 31.3 | – |
| Text-Only (GPT-5.4) | – | 38.4 | 35.6 | 38.9 | 35.5 | 37.1 | – |
| Human (streaming) | – | 93.2 | 81.0 | 86.4 | 79.2 | 86.6 | – |
| Human (offline) | – | 97.0 | 86.2 | 94.2 | 89.2 | 92.2 | – |
| Closed-source proprietary MLLMs | |||||||
| Gemini-3.1-Pro | – | 61.9 | 64.0 | 55.9 | 54.9 | 59.2 | 🥇 1 |
| GPT-5.4 | – | 54.6 | 57.6 | 50.8 | 40.5 | 50.9 | 5 |
| Gemini-3.1-Flash-Lite | – | 54.1 | 52.2 | 54.1 | 42.8 | 50.8 | 7 |
| Grok-4.1-Fast | – | 44.8 | 46.6 | 48.5 | 35.0 | 43.7 | 19 |
| Open-source general video MLLMs | |||||||
| Qwen3-VL | 235B-A22B | 52.5 | 55.2 | 61.2 | 45.7 | 53.6 | 🥈 2 |
| Qwen3.5 | 397B-A17B | 49.6 | 55.4 | 58.1 | 45.4 | 52.1 | 🥉 3 |
| Qwen3.5 | 27B | 51.5 | 55.2 | 52.4 | 47.7 | 51.7 | 4 |
| InternVL-3.5 | 241B-A28B | 55.6 | 55.7 | 51.6 | 40.5 | 50.9 | 6 |
| InternVL-3.5 | 38B | 54.7 | 54.4 | 45.5 | 41.9 | 49.1 | 8 |
| Qwen3-VL | 32B | 50.1 | 51.9 | 51.9 | 41.2 | 48.8 | 9 |
| Qwen3-VL | 4B | 43.3 | 48.2 | 54.5 | 41.4 | 46.8 | 10 |
| Qwen3.5 | 9B | 47.5 | 49.4 | 50.2 | 36.6 | 45.9 | 12 |
| Qwen3.5 | 4B | 45.4 | 48.2 | 49.3 | 38.7 | 45.4 | 13 |
| InternVL-3.5 | 8B | 45.9 | 45.8 | 47.2 | 39.3 | 44.6 | 16 |
| Qwen2.5-VL | 7B | 40.7 | 45.5 | 45.9 | 44.7 | 44.2 | 17 |
| GLM-4.6V-Flash | 9B | 44.6 | 48.0 | 46.6 | 33.8 | 43.2 | 22 |
| Gemma-4 | 26B-A4B | 49.3 | 46.6 | 45.0 | 29.3 | 42.6 | 24 |
| Gemma-4 | E4B | 40.9 | 42.8 | 42.8 | 32.3 | 39.7 | 30 |
| Gemma-4 | E2B | 38.8 | 36.5 | 39.3 | 29.6 | 36.1 | 36 |
| Streaming video MLLMs | |||||||
| StreamForest | 7B | 46.6 | 45.2 | 49.7 | 34.9 | 44.1 | 18 |
| StreamingVLM | 7B | 38.7 | 50.5 | 41.8 | 41.2 | 43.0 | 23 |
| Flash-VStream | 7B | 18.7 | 29.9 | 22.5 | 28.7 | 24.9 | 38 |
| Token-compression and memory-based methods | |||||||
| FluxMem | 7B | 43.0 | 47.6 | 45.5 | 42.6 | 44.7 | 14 |
| HERMES | 7B | 40.9 | 45.4 | 49.4 | 42.9 | 44.6 | 15 |
| StreamingTOM | 7B | 37.2 | 48.2 | 38.7 | 33.5 | 39.4 | 31 |
| InfiniPot-V | 7B | 39.1 | 35.7 | 41.9 | 40.6 | 39.3 | 32 |
| Spatially fine-tuned MLLMs | |||||||
| VST-7B-SFT | 7B | 43.3 | 44.0 | 43.6 | 37.9 | 42.2 | 26 |
| VST-7B-RL | 7B | 45.7 | 44.2 | 40.9 | 38.0 | 42.2 | 25 |
| SenseNova-SI-1.5 | 8B | 42.1 | 42.4 | 42.7 | 32.8 | 40.0 | 29 |
| Spatial-TTT | 2B | 38.7 | 35.4 | 41.0 | 32.7 | 37.0 | 33 |
| Cambrian-S | 7B | 40.2 | 40.0 | 36.9 | 29.9 | 36.8 | 34 |
| Spatial-MLLM | 7B | 35.7 | 39.2 | 34.4 | 36.3 | 36.4 | 35 |
| Cambrian-S-LFP | 7B | 38.8 | 38.0 | 34.2 | 28.7 | 34.9 | 37 |
| Embodied foundation models | |||||||
| RynnBrain | 8B | 45.3 | 50.3 | 47.3 | 42.7 | 46.4 | 11 |
| VeBrain | 7B | 42.7 | 44.2 | 46.2 | 40.8 | 43.5 | 21 |
| RoboBrain2.5-NV | 8B | 42.9 | 46.6 | 50.6 | 34.1 | 43.6 | 20 |
| RoboBrain2.5 | 4B | 40.1 | 43.4 | 48.1 | 35.7 | 41.8 | 27 |
| Cosmos-Reason1 | 7B | 44.8 | 43.7 | 45.5 | 31.9 | 41.5 | 28 |
Numbers replicated from the paper's main results table. The public dataset release is linked above; a submission portal and live leaderboard will follow.
@misc{li2026ovosbench,
title = {OVO-S-Bench: A Hierarchical Benchmark for Streaming Spatial Intelligence in Multimodal LLMs},
author = {Li, Yifei and Liu, Pengyiang and Zang, Yuhang and Shi, Zhongyue and Fu, Qi and Hao, Hongye and Lu, Jiwen},
year = {2026},
eprint = {2606.03890},
archivePrefix = {arXiv},
primaryClass = {cs.CV},
url = {https://arxiv.org/abs/2606.03890}
}